Jansen's Linkage - "1. Research"
- Moojo Kim
- 2020년 9월 26일
- 3분 분량

최종 수정일: 2020년 9월 28일
Before starting to build my own version of Jansen's Linkage, or Theo Jansen Mechanism, I conducted some basic research in order to gain an idea of how to make it myself.
History of Theo Jansen Mechanism

Hindemith, 2007
Dutch artist Theo Jansen is a pioneer in Kinetic art, a branch of art that combines art, mathematics, and engineering. His most famous works are large moving mechanisms made of polyvinyl chloride (PVC) pipes that operate by wind thrust. These structures walk the coastline of Netherlands, walking by wind power and fleeing away from water (TED Conferences, 2020), and are collectively called "Strandbeesten", which means "beach animals" for their constant walking along the coast with multiple legs. Currently, there are more than 48 strandbeesten made by Theo Jansen, including the most recent one, Mimicrae, that mimics the movement of a crab and a caterpillar.
Although each standbeesten differs in size and shape, the general mechanism or principle it uses to move is same; Theo Jansen Mechanism, or Jansen's linkage, developed by Theo Jansen himself, is what these sculptures use to convert wind thrust to mechanical motion of their legs. Although its purpose was to generate a smooth walking motion from the thrust force provided by wind, the same structure can also be used to generate mechanical "leg" motion from the circular motion of a central crank link provided by any rotary actuator such as a DC motor (NITK Surathkal, 2016).
Theory

Figure 1 (Nansai, 2016)
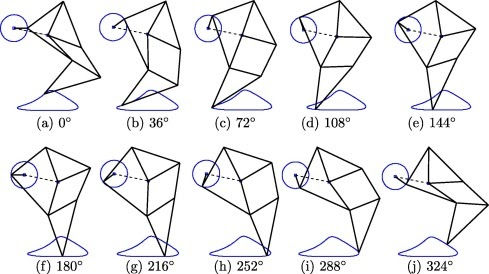
Figure 2 (Patnaik, 2015)
Figure 3 (NITK Surathkal, 2016)
Jansen's linkage converts simple rotary input (circular motion) of the central crank link into a simulation of organic walking found in animals like crabs (Moldovan, 2010). As shown in figure 1, a single 'leg' of a Jansen's linkage system can be divided into five main parts according to function : the central crank link, P3, the loose bars that are directly linked to the central crank links P3–P4, P3–P2, and P3–P6, the secondary loose bars P2–P1, P5–P7, and P1–P6, and the two fixed triangles P4–P1–P5 and P6–P8–P7. The central crank link, P3, is the part that rotates in constant centripetal acceleration. The force provided by the circular movement of this part is unevenly distributed to each directly linked loose bars, but all bars work together to achieve a collective objective: to cause P8 to move in an ellipse-like trajectory.
Figure 2 shows the steps of how Jansen's linkage operates by 36° intervals. At 0°, bar P3–P6 (these points from figure 1 will be used to describe the procedure) pulls the bottom triangle up, while bar P3–P4 pulls the top triangle to the front, pushing bar P5–P7 down and pulling bar P1–P6 up. This causes the bottom triangle to be leaned to the front. From 0° to 90°, bar P3–P6 is pushes the bottom triangle to the back-down direction, while it pulls bar P3–P4 up, causing both bars P5–P7 and P1–P6 to move back, creating a gentle back-down direction decline in the trajectory of the foot (P8). Then, from 90° to 180°, bar P3–P6 is pulled back, and bar P3–P6 is pushed down-right. This causes the trajectory of P8 to move horizontally across, and the same continues until 270°. From 270° to 360°, both bars P3– P6 and P3–P4 is pulled up, causing the trajectory of P8 to move up to the origin, the point on 0°.
As abstractly outlined on the procedure above, Jansen's linkage involves a total of 11 links intricately affecting each other's motion to create an ellipse-like trajectory of the foot, P8. Theo Jansen referenced crabs' walking mechanisms and their legs' dimensions derive the appropriate lengths for optimal movement.
Bibliography
Hindemith, Axel. “File:Jansen Theo Hannover.jpg.” Wikipedia, Sept. 2007, en.wikipedia.org/wiki/File:Jansen_Theo_Hannover.jpg.
Moldovan, Florina, and Valer Dolga. “Analysis of Jansen Walking Mechanism Using CAD.” Solid State Phenomena, vol. 166-167, Sept. 2010, pp. 297–302., doi:10.4028/www.scientific.net/ssp.166-167.297.
Nansai, Shunsuke, et al. “Speed Control of Jansen Linkage Mechanism for Exquisite Tasks.” Journal of Advanced Simulation in Science and Engineering, vol. 3, no. 1, 2016, pp. 47–57., doi:10.15748/jasse.3.47.
NITK Surathkal. “Jansen Linkage Model.” Virtual Labs, NITK Surathkal, 2016, mm-nitk.vlabs.ac.in/exp25/index.html.
Patnaik, Lalit, and Loganathan Umanand. “Kinematics and Dynamics of Jansen Leg Mechanism: A Bond Graph Approach.” Simulation Modelling Practice and Theory, vol. 60, 2016, pp. 160–169., doi:10.1016/j.simpat.2015.10.003.
TED Conferences. “Theo Jansen.” TED Speaker, TED Conferences, 2020, www.ted.com/speakers/theo_jansen.



댓글